Généralités en anatomie pour les STAPS
Paris | 27 juillet 2023
Tout le programme STAPS des deux premières années
Découvrez le Chapitre 1 : Généralités en anatomie et la table des matières de l’ouvrage STAPS : anatomie, physiologie, neurosciences et biomécanique S’ouvre dans une nouvelle fenêtre.
PLAN DE LA PARTIE I 1. Généralités en anatomie 2. Anatomie appliquée aux activités sportives de lancer et de préhension 3. Anatomie appliquée aux activités sportives de contact et d’esquive 4. Anatomie appliquée aux activités sportives de locomotion et de détente 5. Systèmes nerveux et cardiovasculaire

Chapitre 1 : Généralités en anatomie
PLAN DU CHAPITRE
Introduction Vocabulaire et repères en anatomie Principaux éléments anatomiques du squelette Notion de complexe articulaire Description anatomique des muscles
Introduction
Définition de l’anatomie
L’anatomie est la science qui a pour objet l’étude de la structure et de la morphologie des êtres vivants et en particulier de l’homme [1]. Historiquement, c’est l’étude de la structure des organes par leur dissection. Elle est fondée sur l’observation et la description minutieuse des structures des corps vivants. Elle recherche la connaissance des structures qui composent les organismes vivants en précisant leurs situations, leurs formes, leurs rapports, leurs fonctions, leurs particularités, etc. Longtemps construite à partir de dissections post-mortem, elle utilise aujourd’hui d’autres techniques d’investigation (radiographie, tomographie, échographie, endoscopie, imagerie par résonance magnétique, prélèvements tissulaires, etc.). De nature descriptive, elle constitue, avec la physiologie (qui précise le fonctionnement des structures du vivant) et la pathologie (qui étudie les maladies et les dysfonctionnements du corps vivant), un des trois piliers de la connaissance biomédicale. Elle est un prérequis incontournable pour quiconque cherche à analyser et à comprendre le fonctionnement du corps humain. En science du sport et du mouvement, elle est indispensable à toute analyse gestuelle, à la connaissance des contraintes qui s’exercent lors des mouvements et à l’anticipation des effets induits par l’exercice physique sur les structures et sur les organes du corps humain.
Branches de l’anatomie
Selon ce qu’elle cherche à étudier ou l’approche méthodologique qu’elle utilise, l’anatomie peut être subdivisée en différentes branches :
l’anatomie générale, branche de l’anatomie qui étudie les structures fondamentales des organes et l’appartenance de ceux-ci à des systèmes de même structure et à des appareils constitués en vue d’une fonction [2]. Elle est souvent associée à la physiologie pour préciser le fonctionnement des corps vivants;
l’anatomie descriptive, branche de l’anatomie qui précise la morphologie et la structure des organes. Elle est la base de la connaissance en anatomie. Elle utilise un vocabulaire formalisé précis et sans ambiguïté. Elle est elle-même subdivisée en fonction des structures décrites : – l’ostéologie est l’étude anatomique des os, – l’arthrologie est l’étude anatomique des articulations, – la myologie est l’étude anatomique des muscles;
l’anatomie fonctionnelle, branche de l’anatomie qui étudie les relations entre les systèmes ou portions de systèmes voués à une même fonction au sein d’un appareil. Elle s’applique particulièrement à l’appareil moteur dans une relation entre forme et fonction [2];
l’anatomie comparée, branche de l’anatomie qui compare les structures humaines avec celles des autres espèces du vivant;
l’anatomie appliquée, branche de l’anatomie développée en fonction d’une application particulière diagnostique ou thérapeutique [2];
l’anatomie pathologique ou l’anatomo-pathologie, branche de l’anatomie qui décrit les lésions causées aux structures des corps vivants par une pathologie;
l’anatomie topographique, branche de l’anatomie qui étudie les régions et les espaces anatomiques en précisant les rapports des structures entre elles;
l’anatomie de surface, branche de l’anatomie qui précise les formes et les reliefs cutanés au regard des structures anatomiques sous-cutanées;
l’anatomie anthropologique, branche de l’anatomie qui étudie les évolutions et les différences anthropologiques des êtres vivants;
l’anatomie radiologique, branche récente de l’anatomie utilisant l’imagerie comme méthode d’exploration (extension à tout moyen d’imagerie médicale);
l’anatomie artistique, branche de l’anatomie qui étudie les formes extérieures du corps humain, tant statiques que dynamiques, en vue de leur compréhension et de leur application aux arts plastiques [2].
Vocabulaire et repères en anatomie
Nomenclature anatomique
Comme toutes les sciences, l’anatomie a son propre vocabulaire pour décrire, expliciter et modéliser les structures qu’elle étudie. L’ensemble des termes propres à un domaine est appelé terminologie [1]. L’ensemble du vocabulaire anatomique utilisé est donc appelé terminologie anatomique. Pendant longtemps, de nombreuses terminologies se sont côtoyées, ne facilitant pas la communication du savoir anatomique et les échanges entre professionnels. À la fin du XIXe siècle, on comptait plus de 50 000 termes pour désigner les 5 000 structures fondamentales du corps humain [3]. En 1998, afin d’uniformiser le vocabulaire anatomique, le Federative Committee on Anatomical Terminology (groupe de travail de la International Federation of Associations of Anatomists) propose l’adoption par tous d’une terminologie unique : la Terminologia Anatomica (TA). Admise par tous depuis, elle est la référence terminologique mondiale. Publiée en latin et en anglais, elle a fait l’objet de traductions littérales dans de nombreuses langues parmi lesquelles le français. La TA est constituée de 7 444 termes anatomiques, dont 206 sont classés à deux endroits différents. Elle est constituée de 16 chapitres [4]. Elle supprime les éponymes et les homonymes, uniformise la terminologie par région et les termes descriptifs choisis ont une valeur informative et descriptive [3].
Termes anatomiques
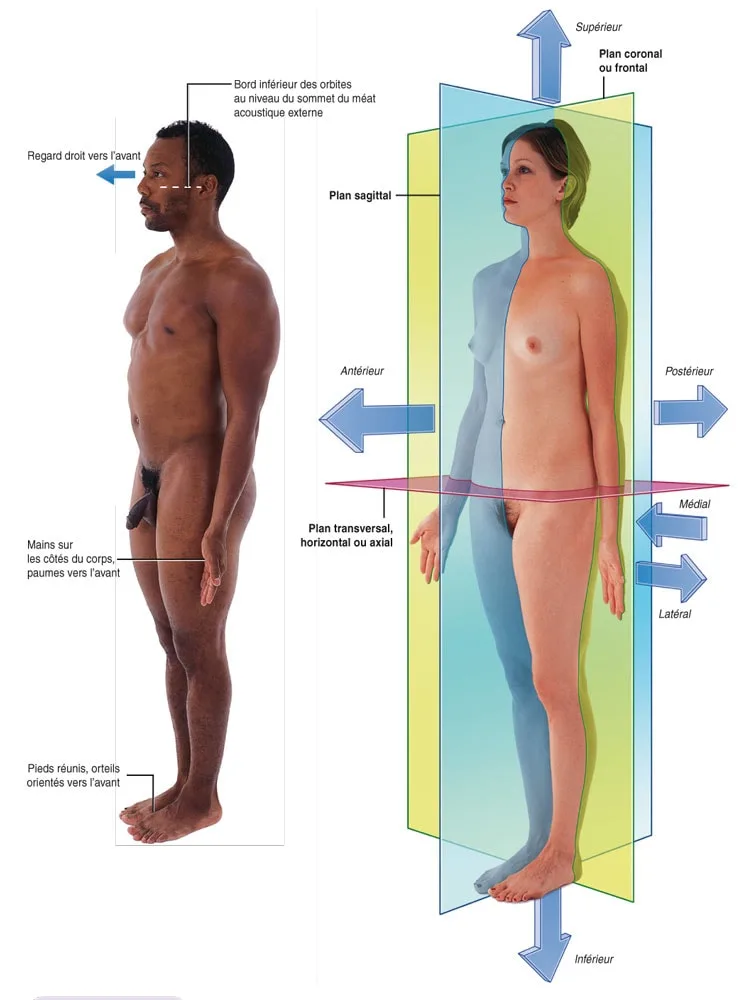
Position de référence
La position anatomique de référence (figure 01-01) est la position du corps humain à partir de laquelle toutes les descriptions anatomiques sont faites :
le sujet est en position debout;
le regard est droit et à l’horizontale;
les membres supérieurs sont pendants le long du corps;
les paumes des mains sont tournées vers l’avant;
es pieds sont joints par les talons, les pointes légèrement écartées.
Figure 01-01 Position anatomique et plans de l’espace.
La position de référence est invariante quelle que soit la position du sujet (debout, assis, couché, etc.). Une structure située en avant d’une autre en position debout ne devient pas supérieure en position couchée sur le dos, elle reste en avant.
Axes anatomiques
Un axe est une ligne imaginaire servant de référence. L’anatomie descriptive utilise trois axes essentiels.
Axe médian du corps
C’est la droite verticale abaissée du sommet du crâne (vertex) du sujet vivant en position anatomique de référence. Il correspond à la ligne de gravité. Il passe par le centre de la première vertèbre cervicale, le centre de la première vertèbre lombaire, le centre de gravité en avant du sacrum et se projette en avant des chevilles.
Axe de la main
C’est la droite longitudinale de l’avant-bras et de la main passant par le troisième doigt.
Axe du pied
C’est la droite longitudinale du pied passant par le deuxième orteil.
Plans anatomiques
Les plans anatomiques constituent le système de référence en anatomie, permettant de préciser la localisation d’une structure et de décrire les mouvements du corps humain. Nous verrons dans les chapitres suivants les descriptions détaillées des mouvements élémentaires s’effectuant dans un seul plan et celles des mouvements combinés dans plusieurs plans. Chaque plan anatomique est une surface imaginaire bidimensionnelle qui divise le corps humain en deux parties. Il en existe trois grands types qui correspondent aux trois plans de l’espace, tous perpendiculaires les uns par rapport aux autres (figure 01-01).
Plans sagittaux
Ce sont tous les plans verticaux orientés d’avant en arrière qui divisent le corps en deux parties latérales, une droite et une gauche. Celui qui passe par l’axe médian du corps est appelé le plan sagittal médian. Tous les autres sont appelés plans sagittaux paramédians. C’est dans ces plans que sont le plus souvent étudiées les activités de marche, de course, d’accroupissement et de saut.
Plans frontaux
Ce sont tous les plans verticaux perpendiculaires aux plans sagittaux qui divisent le corps en deux parties, une antérieure et une postérieure. Celui qui passe par l’axe médian du corps est appelé le plan coronal. C’est dans ces plans que sont étudiés notamment l’équilibre du bassin dans la marche ou la course, les boiteries à la marche et les troubles de l’équilibre dynamique.
Plans transversaux
Ce sont tous les plans horizontaux perpendiculaires aux plans sagittaux et frontaux qui divisent le corps en deux parties, une supérieure et une inférieure. C’est dans ces plans que sont réalisées les coupes anatomiques.
Terminologie d’orientation dans l’espace
Différents termes précis permettent de situer une structure anatomique dans l’espace (figure 01-02).
Figure 01-02 Terminologie anatomique spatiale.
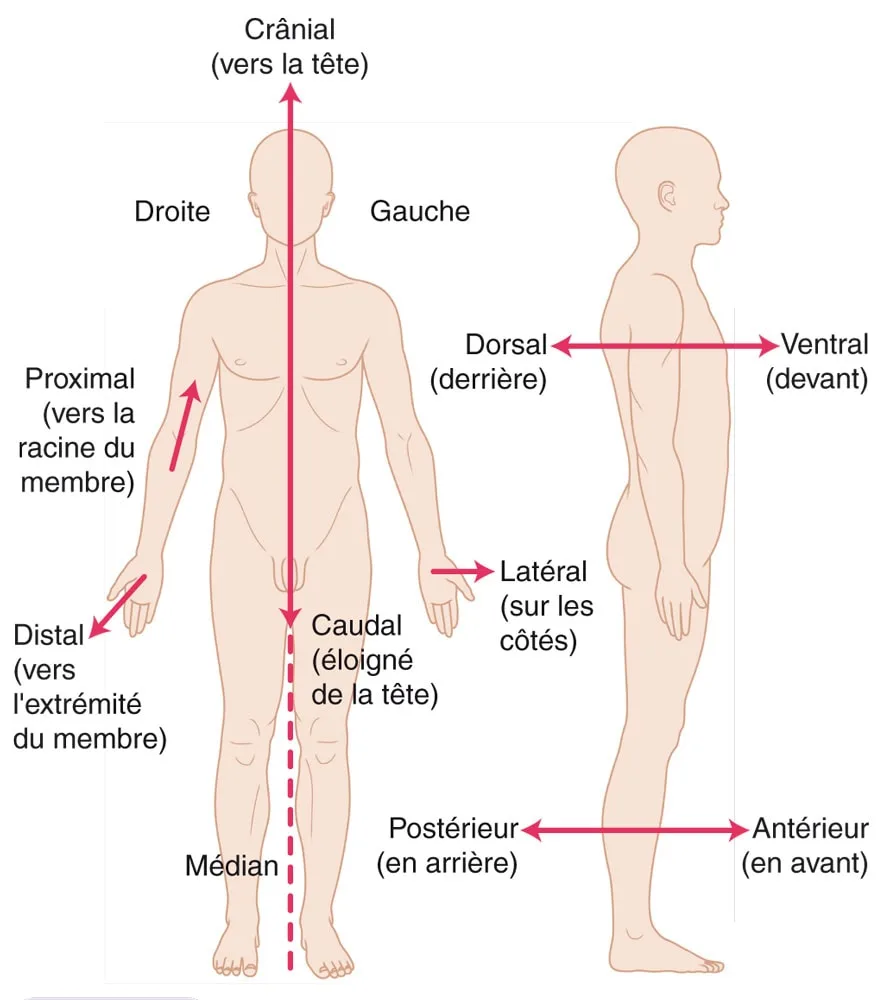
Antérieur ou ventral vs postérieur ou dorsal
Est dit antérieur ou ventral tout élément situé en avant, et inversement, tout élément situé en arrière est dit postérieur ou dorsal. Les termes « ventral » et « dorsal » sont essentiellement utilisés pour la description des éléments anatomiques du rachis. Le terme « dorsal » est également utilisé pour définir la face postérieure de la main et la face supérieure du pied.
Médial ou interne vs latéral ou externe
Est dit médial ou interne tout élément proche du plan sagittal médian, et inversement tout élément qui s’en éloigne est dit latéral ou externe. Lorsqu’un élément est orienté vers le médial, on dit également qu’il est orienté « vers le dedans », et inversement, on dit qu’il est orienté « vers le dehors » lorsque l’élément est orienté vers le latéral.
Inférieur vs supérieur
Est dit inférieur tout élément anatomique situé en dessous d’un autre, et inversement, tout élément situé au-dessus est dit supérieur.
Proximal vs distal
Cette terminologie est réservée aux membres. Est dit proximal tout élément anatomique situé près de la racine des membres (épaule et hanche) et, inversement, tout élément éloigné de la racine des membres est dit distal.
Crânial vs caudal
Cette terminologie est réservée au tronc. Est dit crânial tout élément anatomique situé près de la tête et, inversement, tout élément éloigné de la tête est dit caudal.
Axial vs abaxial
Est dit axial tout élément anatomique situé sur un des axes du corps et, inversement, tout élément qui s’en éloigne est dit abaxial.
Superficiel vs profond
Est dit superficiel tout élément anatomique situé proche de la surface du corps et, inversement, tout élément qui s’en éloigne est dit profond.
Homolatéral vs controlatéral
Est dit homolatéral tout élément anatomique situé du même côté que celui qui sert de référence, et inversement, tout élément du côté opposé est dit controlatéral.
Supra ou sus vs infra ou sous
Est dit supra tout élément anatomique situé au-dessus de celui qui sert de référence, et inversement, tout élément situé en dessous est dit infra. Les termes « sous » et « sus » sont utilisés pour décrire les tissus (muscles, ligaments, peau, etc.).
Terminologie clinique
Mouvements actifs et passifs
Un mouvement actif est un mouvement réalisé par le sujet, sous la seule action de sa volonté et de ses contractions musculaires volontaires, sans aucune aide extérieure. Par exemple, les activités de gymnastique ou les « gammes » en athlétisme sont principalement à base d’exercices actifs. Un mouvement passif est un mouvement sans aucune participation du sujet, réalisé uniquement par l’action de forces ou d’aides externes. À titre d’exemple, les techniques d’ostéopathie sont essentiellement à base d’exercices passifs.
Contractions statique, concentrique et excentrique
Le travail concentrique est caractérisé par un raccourcissement musculaire, en rapprochement des points d’insertion musculaire. Il est utilisé dans toutes les propulsions et accélérations d’un segment corporel ou du corps entier [5]. Le travail excentrique freinateur est caractérisé par un allongement musculaire, en éloignement des points d’insertion musculaire. Il est utilisé dans toutes les activités d’amortissement de saut et de décélération d’un segment corporel ou du corps entier [5]. Le travail statique est caractérisé par une contraction musculaire sans raccourcissement du muscle et sans déplacement du segment corporel ou du corps entier [5].
Chaînes ouverte et fermée
Le travail musculaire est défini en chaîne cinétique ouverte (CCO) lorsque l’extrémité distale du membre est mobile, ou en chaîne cinétique fermée (CCF) lorsque l’extrémité distale du membre est fixe.
Principaux éléments anatomiques du squelette
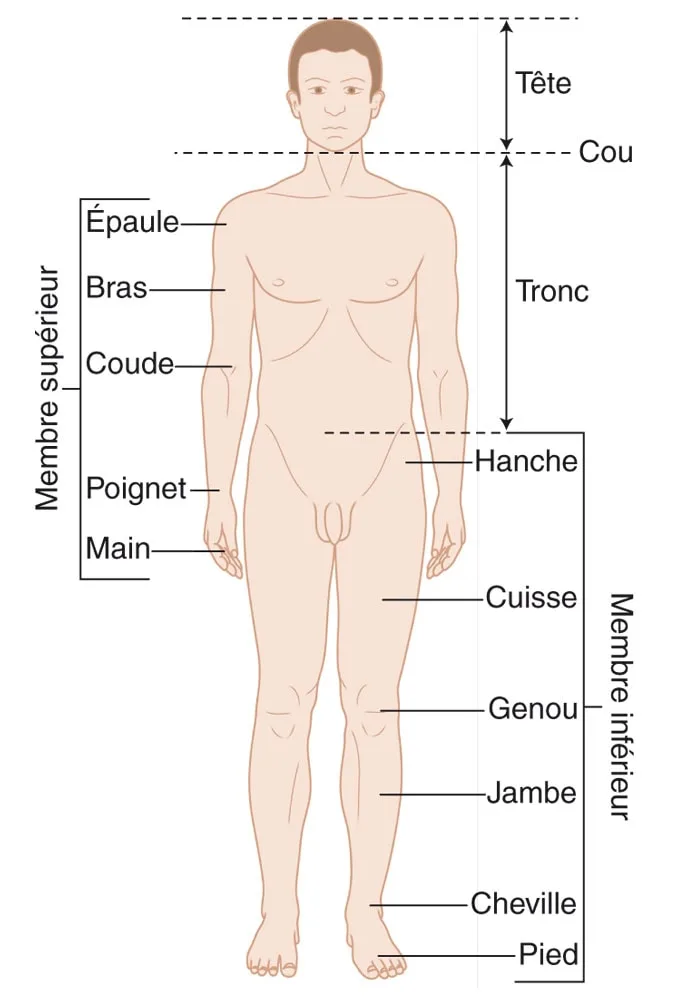
Parties et régions du corps humain
Le corps humain est constitué de sept parties distinctes : la tête, le cou, le tronc, les deux membres inférieurs et les deux membres supérieurs. Les membres sont eux-mêmes subdivisés par segments (figure 01-03).
Figure 01-03 Parties et segments du corps humain.
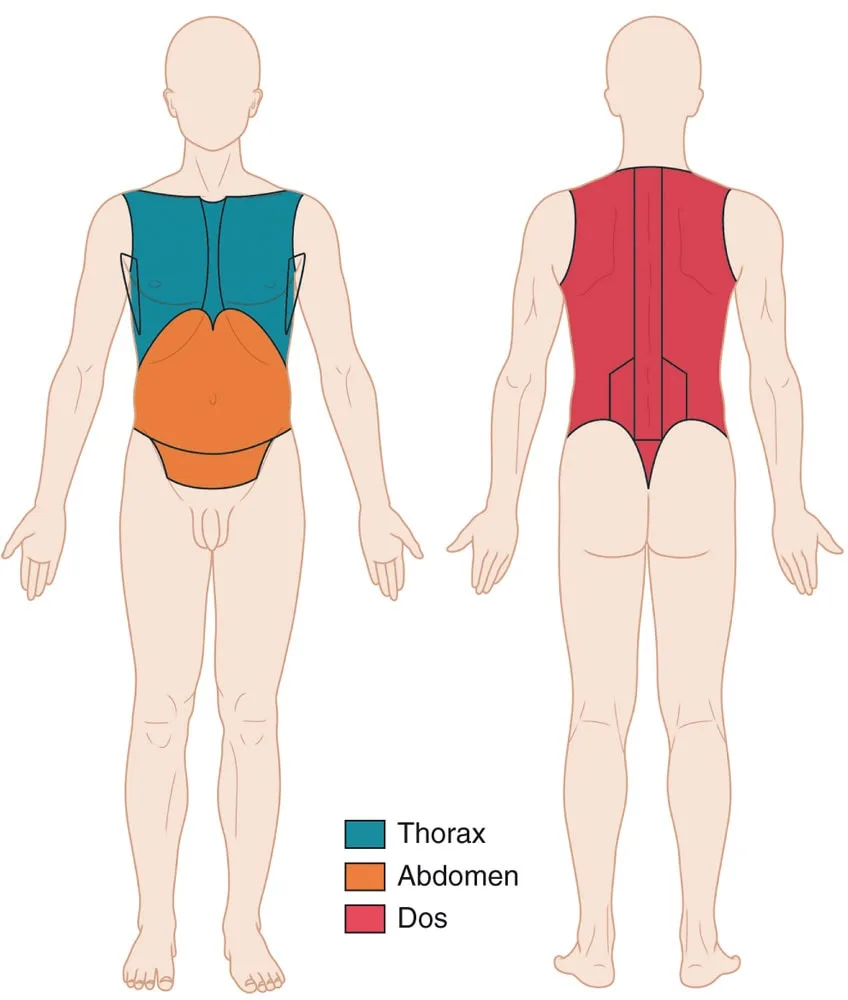
Les parties du corps humain sont divisées en régions anatomiques (figure 01-04).
Figure 01-04 Régions du corps humain.
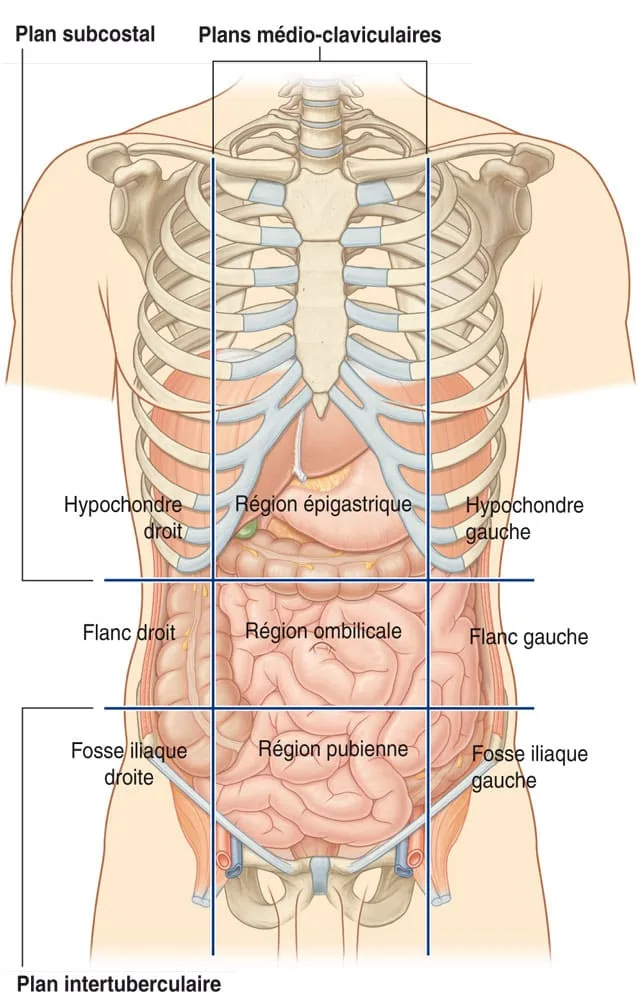
La région abdominale est divisée en neuf régions anatomiques (figure 01-05).
Figure 01-05 Modèle en neuf régions abdominales.
Squelette osseux
Le squelette osseux humain compte 206 os constants et un nombre d’os surnuméraires variable d’un individu à l’autre. Le squelette assure un double rôle de charpente du corps vivant et de protection des organes essentiels : 1. muscles et ligaments se fixent sur les pièces osseuses, délimitant des espaces dans lesquels cheminent ou se placent des éléments anatomiques et/ou des organes; 2. le crâne et la colonne vertébrale protègent le système nerveux central, la cage thoracique protège le cœur et les poumons et le bassin protège les organes de la reproduction.
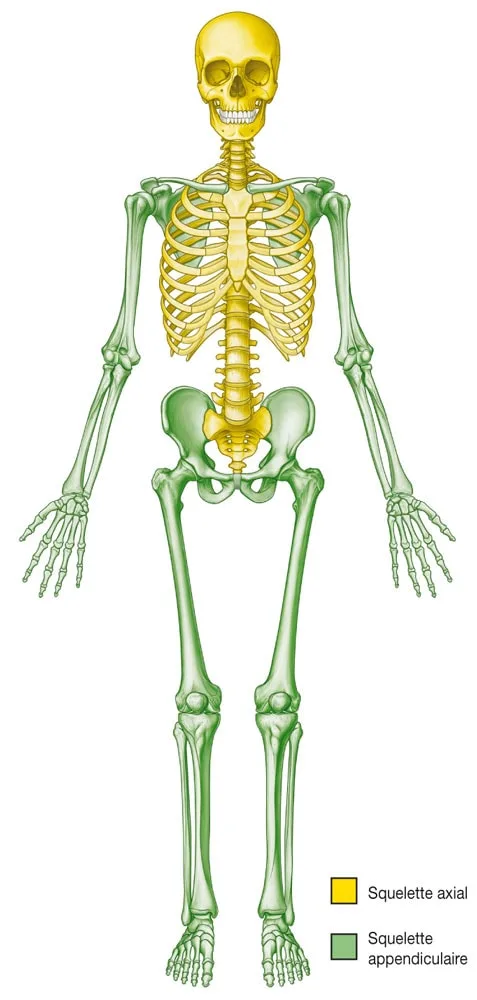
Le squelette osseux est organisé autour d’un axe vertical : la colonne vertébrale. Les ceintures pelvienne et scapulaire lient les quatre membres au tronc. On appelle le squelette axial l’ensemble constitué des os de la tête et du cou, de la colonne vertébrale et du squelette de la cage thoracique. Par opposition, on appelle l’ensemble représenté par le squelette osseux des quatre membres : le squelette appendiculaire (figure 01-06).
Figure 01-06 Squelette osseux humain.
Architecture osseuse
Le squelette de la tête est constitué des os du crâne (os frontal en avant, os occipital en arrière, os pariétaux (n = 2) latéralement, os temporaux (n = 2) latéralement en avant des précédents, sphénoïde à la base du crâne et ethmoïde entre les orbites) et des os de la face (os lacrymaux (n = 2), os zygomatiques (n = 2), os palatins (n = 2), os nasaux (n = 2), cornets nasaux inférieurs (n = 2), vomer, os maxillaires (n = 2) qui forment la partie supérieure fixe de la mâchoire et mandibule qui en constitue la partie inférieure mobile).
La colonne vertébrale est constituée des vertèbres cervicales (n = 7), thoraciques (n = 12) et lombaires (n = 5), du sacrum et du coccyx.
Le squelette du cou est constitué des vertèbres cervicales (n = 7) et de l’os hyoïde (situé au-dessus du larynx, à la partie supéro-antérieure du cou).
Le squelette thoracique est constitué des côtes (n = 12), des cartilages costaux et du sternum.
Le squelette du membre supérieur est constitué (du proximal au distal) des os de la ceinture scapulaire (scapula et clavicule), de l’humérus, des os de l’avant-bras (radius et ulna), des os du poignet (scaphoïde, lunatum, triquetrum, pisiforme, trapèze, trapézoïde, capitatum et hamatum) et des os de la main (métacarpes) et des doigts (phalanges).
Le squelette du membre inférieur est constitué (du proximal au distal) des os de la ceinture pelvienne (os coxaux, sacrum et coccyx), du fémur, de la patella, des os de jambe (tibia et fibula), des os du pied (talus, calcanéus, cuboïde, naviculaire, cunéiformes, métatarses) et des orteils (phalanges).
Typologie osseuse
Les os du squelette humain sont caractérisés par leur forme. Il en existe trois types :
les os longs, dont un des axes dimensionnels est très supérieur aux deux autres. Ils sont constitués de deux extrémités (appelées épiphyses) et d’une partie intermédiaire appelée corps ou diaphyse (par exemple la clavicule et le fémur);
les os courts, dont les trois axes dimensionnels sont quasiment équivalents. Ils ont souvent des formes cubiques ou trapézoïdales (par exemple le calcanéus);
les os plats, dont un des trois axes dimensionnels est très inférieur aux deux autres (par exemple la scapula).
Morphologie osseuse
Le plus souvent, la surface des os n’est pas plane. Elle est façonnée par des saillies et des dépressions correspondant à des zones de contraintes en traction (saillies) ou en compression (dépressions).
Saillies osseuses
Elles désignent tous les volumes osseux proéminents à la surface de l’os. On différencie les saillies non articulaires, qui correspondent le plus souvent à des zones d’insertion musculaire ou ligamentaire, et les saillies articulaires (têtes ou condyles). Selon leur forme et leur dimension, les saillies osseuses non articulaires sont différenciées en processus, tubérosité, tubercule, épine, crête, éminence et protubérance.
Dépressions osseuses
Elles désignent toutes les cavités et les reliefs en creux à la surface de l’os. On différencie les dépressions non articulaires qui correspondent à l’empreinte d’une structure anatomique (organes, insertions musculaires, passage d’un nerf, d’une artère, d’un tendon), et les dépressions articulaires avec les saillies articulaires. Selon leur forme, leur dimension et leur localisation, les dépressions osseuses non articulaires sont différenciées en cavités (fosses, sillons, incisures). Les incisures sont des dépressions situées sur les bords des os.
Foramens
En anatomie, on désigne un « trou » par le terme foramen. On en trouve à la surface des os pour laisser le passage des nerfs et/ou des vaisseaux sanguins.
Notion de complexe articulaire
Structures articulaires
Cartilage hyalin
Tissu conjonctif d’interface entre les surfaces articulaires des pièces osseuses en contact, il joue un rôle essentiel dans le fonctionnement et la mobilité articulaire. Il présente un aspect blanc et nacré. Il est épais de 1 à 4 mm selon les articulations. Il combine des propriétés de rigidité, d’élasticité et de déformabilité lui permettant d’assurer une répartition harmonieuse des pressions qui s’exercent sur l’articulation en charge (rôle d’amortisseur) ou en mouvement (facilite les glissements entre les pièces osseuses). Le cartilage hyalin articulaire se nourrit par imbibition du liquide synovial intra-articulaire environnant et à partir d’échanges vasculaires avec l’os sous-jacent (os sous-chondral). Il n’est pas innervé. Sa dégénérescence conduit à l’arthrose. On le différencie des fibrocartilages (ou cartilage fibreux) constituant les disques intervertébraux, disques et ménisques intra-articulaires et labrum. Il est également différencié du cartilage élastique constitutif du larynx et de l’oreille. Il est à noter que le cartilage hyalin est également constitutif des cartilages costaux, de la trachée et des bronches.
Os sous-chondral
Désigne la zone osseuse située directement sous le cartilage. Dans les cas d’atteinte cartilagineuse sévère, il peut être le siège de lésions se traduisant par une densification osseuse.
Capsule
Enveloppe fibreuse entourant certaines articulations (appelées de fait articulations synoviales), elle est constituée de deux couches, l’une externe fibreuse très résistante et l’autre interne tapissée d’une muqueuse et appelée membrane synoviale. Cette dernière présente des replis (ou cul de sac), dont le déplissement est nécessaire à la mobilité articulaire. Elle assure le maintien des surfaces articulaires en correspondance mécanique. Elle est fréquemment renforcée par des ligaments.
Synovie
Liquide intra-articulaire, produit par la membrane synoviale, de composition chimique très proche de celle du cartilage. « Physiologiquement, il a un double rôle : mécanique par lequel il contribue à assurer le glissement des surfaces articulaires les unes sur les autres, et biologique, par lequel il assure la nutrition du cartilage articulaire » [2].
Labrum
Cartilage fibreux en forme d’anneau, il est situé aux pourtours des surfaces articulaires afin d’en augmenter la congruence1. Les articulations entre la hanche et le bassin (articulation coxo-fémorale) et entre la scapula et l’humérus (articulation scapulo-humérale) présentent un labrum.
Disque articulaire
Fibrocartilage intra-articulaire présent au sein de certaines articulations synoviales dont les surfaces articulaires sont discordantes. Sa fonction est alors d’en augmenter la congruence. Il peut être de forme ovalaire, parfois incomplète (forme en croissant). Le terme de ménisque est utilisé pour nommer les disques articulaires en forme de croissant (ou demi-lune).
Types articulaires
Selon leur constitution, les articulations sont différenciées en trois types (figure 01-07).
Figure 01-07 Types articulaires.
Cliquez pour ouvrir l’illustration 01-07

Articulations fibreuses
Les surfaces articulaires sont unies par du tissu fibreux. On y retrouve les syndesmoses (les deux surfaces articulaires sont réunies par du tissu fibreux), les sutures (unies par contact osseux après ossification du tissu fibreux) et les gomphoses (entre deux pièces osseuses dans lesquelles l’une est enfoncée dans l’autre à la manière d’un coin ou d’un clou).
Articulations cartilagineuses
Les surfaces articulaires sont unies par du cartilage hyalin ou du fibrocartilage. On y retrouve les synchondroses (l’union des pièces osseuses est assurée par du cartilage hyalin) et les symphyses (l’union des pièces osseuses est assurée par du fibrocartilage).
Articulations synoviales
Les surfaces articulaires sont unies par une capsule fibreuse contenant du liquide synovial. Elles sont les plus mobiles.
Les surfaces articulaires sont recouvertes de cartilage. On les différencie en fonction de la forme des surfaces articulaires en contact :
les sphéroïdes : les surfaces articulaires sont de forme sphérique, inversement concave et convexe;
les ellipsoïdes (ou condylaires) : les surfaces articulaires sont des formes ovalaires, l’une en relief (condyle), l’autre en creux (glène);
les bi-condylaires : opposent deux paires de condyles (par exemple articulations du genou);
les articulations en selle : « les surfaces sont en forme de selle, l’une étant concave dans un sens et convexe dans l’autre, la surface opposée étant inversement conformée » [2];
les ginglymes : « articulation dont l’une des surfaces est en forme de poulie (ou trochlée), comportant une gorge médiane séparant deux facettes latérales convexes » [2]. Certains auteurs les décrivent comme des charnières;
les trochoïdes : met en contact un cylindre plein dans un cylindre creux. Fonctionnent autour d’un seul axe de rotation;
les articulations planes : « articulations dont les surfaces sont planes. Elles fonctionnent par un processus de glissement potentiel dans toutes les directions de l’espace. Ce type d’articulation n’est susceptible, en règle générale, que de mouvements limités ».
Moyens d’unions articulaires
Il s’agit de toutes les structures assurant le maintien des surfaces articulaires en correspondance mécanique, aussi bien en position immobile que lors des mouvements.
Ligaments
Lames fibro-élastiques, le plus souvent adhérents à la capsule qu’ils renforcent, les ligaments peuvent aussi être autonomes (décollés de la capsule) ou situés dans l’espace intra-articulaire. Ils jouent un rôle essentiel dans la préservation de l’intégrité articulaire. Leurs propriétés élastiques résistantes à l’étirement assurent lors des mouvements la stabilité de l’articulation et limitent les mobilités articulaires extrêmes. Leur capacité d’étirement est limitée (< 10 % de leur longueur de repos). Lors d’étirements excessifs, ils peuvent être le siège d’élongations ou de ruptures appelées selon la gravité entorse bénigne, moyenne ou grave. Il est à noter que tous les ligaments ne sont pas des moyens d’unions articulaires. Certains assurent la fixation d’organes.
Capsule
Voir chapitre 1, paragraphe « Structures articulaires ».
Tendons musculaires
Les tendons musculaires attachent les muscles aux os. Ils constituent la partie terminale du muscle. Ils prolongent le corps musculaire. Par leur mise en tension lors des contractions musculaires, ils stabilisent les zones articulaires. On leur confère un rôle de stabilité articulaire « active » par opposition à la stabilité « passive » assurée par les ligaments. Bien que plus résistants que les ligaments, ils peuvent être le siège de lésions mécaniques dégénératives appelées tendinopathies, ou traumatiques, appelées ruptures tendineuses.
Mouvements articulaires
Mouvements simples
On appelle mouvements simples ou élémentaires les mouvements effectués dans un seul plan de l’espace et donc autour d’un axe de rotation unique. Les mouvements élémentaires effectués dans le plan sagittal sont appelés flexion (fermeture de l’articulation) et extension (ouverture de l’articulation) [3]. Les mouvements élémentaires effectués dans le plan frontal sont l’abduction (qui éloigne du plan sagittal médian) et l’adduction (qui rapproche du plan sagittal médian). Concernant la main et le pied, la définition des mouvements d’abduction-adduction est établie en référence aux axes de la main et du pied. Concernant le tronc, les mouvements dans le plan frontal sont appelés inclinaison, inflexion ou latéroflexion. Les mouvements élémentaires effectués dans le plan transversal sont la rotation latérale (dans le sens des aiguilles d’une montre pour le membre droit) et la rotation médiale (dans le sens inverse) [3]. Certains auteurs utilisent les termes de rotations externe et interne. Concernant le tronc, sont utilisés les termes de rotations droite et gauche ou rotations horaire et antihoraire.
Mouvements complexes
On appelle mouvements complexes la combinaison de plusieurs mouvements élémentaires. La circumduction est l’association de tous les mouvements élémentaires dans l’espace. Elle permet de décrire un large mouvement circulaire. Au niveau de l’avant-bras, la supination est le mouvement de rotation qui (en position anatomique) oriente la paume de la main vers l’avant. Le mouvement inverse (qui oriente la paume de la main vers l’arrière) est appelé pronation. Au niveau du pied, l’éversion est le « mouvement combinant abduction, flexion dorsale et torsion de l’ensemble du bloc calcanéopédieux pour porter la plante du pied en dehors2 » [2]. Le mouvement inverse est l’inversion. Il correspond à une adduction, une flexion plantaire et une torsion vers le dedans du bloc calcanéopédieux3.
Description type d’une articulation
La description d’une articulation doit préciser :
sa situation (région);
ses particularités (congruence, présence d’un disque, éléments biomécaniques, repères palpatoires, etc.);
son type articulaire;
la description anatomique de ses surfaces articulaires;
ses moyens d’union : capsule, ligaments.
Description anatomique des muscles
Le corps humain compte plus de 600 muscles, dont certains sont inconstants d’un individu à l’autre. Les muscles de la motricité (sous contrôle volontaire) sont dénommés squelettiques. Ils ont la propriété de se contracter sous l’influence d’une excitation et d’être élastiques. Leur rôle est d’assurer le maintien des différentes positions (notamment des positions érigées contre la pesanteur) et de mobiliser les segments corporels lors des mouvements.
Formes musculaires
Il existe différentes formes de muscles squelettiques.
Muscles longs
Leur longueur est prédominante. Ils sont fusiformes (en forme de fuseau). À leurs extrémités, ils sont fixés aux structures osseuses par l’intermédiaire de tendons (par exemple le biceps brachial).
Muscles plats
Leur corps musculaire s’étale en éventail ou en bande sur une surface plus ou moins importante (par exemple les muscles abdominaux). Ils se terminent le plus souvent par des membranes fibreuses planes appelées aponévroses.
Muscles courts
Muscles de petite taille dans toutes leurs dimensions. On les retrouve principalement à la main, au pied, et à la face.
Muscles annulaires
Leur corps musculaire est circulaire, entourant un orifice creux ou un organe (par exemple le muscle orbiculaire de l’œil). Les muscles annulaires qui ferment un orifice naturel et qui, par leur contraction, en rétrécissent la lumière jusqu’à l’obturer sont appelés sphincters.
Structures périmusculaires
Aponévroses
On appelle aponévrose « toute membrane constituée de fibres conjonctives denses qui enveloppe un muscle (aponévrose de revêtement), sert de moyen d’insertion pour un muscle plat (aponévrose d’insertion) et contribue à la constitution d’une cloison entre deux muscles contigus (cloison intermusculaire) ou forme une séparation entre certains plans musculaires (fascia) » [2]. Les aponévroses servant de cloisons entre les loges musculaires sont appelées des septums.
Bourses synoviales
Cavités fermées (poches) de petite taille contenant du liquide synovial, elles sont interposées entre deux éléments anatomiques pour en limiter les contacts directs et faciliter le glissement de l’un par rapport à l’autre dans les mouvements.
Gaines tendineuses
Gaines entourant les tendons et remplies de liquide synovial, elles protègent les tendons des contacts directs avec les structures ostéo-articulaires adjacentes.
Rétinaculums
Bandes fibreuses servant à maintenir les tendons au contact d’une structure osseuse. Dans certains cas, ils permettent de modifier l’orientation d’un tendon, jouant le rôle de poulie de réflexion (par exemple les rétinaculums des muscles fibulaires à la face latérale du calcanéus).
Description type d’un muscle
La description d’un muscle doit préciser :
sa situation : partie et région du corps, groupe musculaire, plan musculaire;
son ou ses origines : insertion proximale ou la plus proche de l’axe médian du corps;
son ou ses trajets : orientation de son cheminement, loge musculaire, rapports avec les structures adjacentes, forme du corps musculaire;
son ou ses terminaisons : insertion distale ou la plus éloigné de l’axe médian du corps;
ses actions et ses rôles : mouvements élémentaires et complexes induits dans les différents plans de l’espace en précisant l’insertion fixe, rôle statique (stabilité, coaptation);
son innervation4 ;
ses particularités : éléments singuliers de fonctionnement ou biomécaniques, abords morpho-palpatoires, données physiopathologiques ou épidémiologiques (risque de blessures, prévalence et incidence des blessures, mécanismes lésionnels).
Notes
1 En anatomie, qualité d’une articulation dont les surfaces s’adaptent exactement dans toutes les positions. 2 Également appelé pronation de l’avant-pied. 3 Également appelé supination de l’avant-pied. 4 Par volonté didactique, l’innervation musculaire n’a pas été renseignée dans cet ouvrage. Il convient cependant de la considérer comme un élément indispensable à la description d’un muscle.
Références [1] Centre National de Ressources Textuelles et Lexicales (CNRTL), www.cnrtl.fr S’ouvre dans une nouvelle fenêtre ; 2017. [2] Académie de Médecine. Dictionnaire médical de l’Académie de Médecine, https://dictionnaire.academie-medecine.fr/ ?q=anatomie ; 2016. [3] Kamina P. Anatomie clinique – Tome 1 : Anatomie générale et membres. Éditions Maloine ; 2009. [4] Baud R, Fabry P, Namer F, et al. Version Francophone de la Terminologia Anatomica. In : Journées Francophones d’Informatique Médicale. 4e édition ; 12-13 mai 2005. Lille. [5] Weineck J. Manuel d’entraînement. 4e édition. Vigot édition ; 1996.
STAPS : anatomie, physiologie, neurosciences et biomécanique. © 2018, Elsevier Masson SAS
Vous venez de lire le Chapitre 1 : Généralités en anatomie de l’ouvrage STAPS : anatomie, physiologie, neurosciences et biomécanique. S’ouvre dans une nouvelle fenêtre
STAPS : anatomie, physiologie, neurosciences et biomécanique Paul Delamarche, Franck Multon, Thierry Horrut, Vincent Nougier ISBN 9782294752674

Table des matières
Partie I - Anatomie (chapitres 1 à 5) Partie II- Physiologie de l'exercice (chapitres 6 à 14) Partie III - Neurosciences (chapitres 15 à 21) Partie IV - Biomécanique de la performance motrice (chapitres 22 à 25)
Généralités en anatomie
Anatomie appliquée aux activités sportives de lancer et de préhension
Anatomie appliquée aux activités sportives de contact et d’esquive
Anatomie appliquée aux activités sportives de locomotion et de détente
Systèmes nerveux et cardiovasculaire
Généralités en physiologie de l'exercice
Muscle
Propriétés mécaniques du muscle
Exercice physique
Adaptations cardiovasculaires à l'exercice et à l'entraînement
Adaptations respiratoires à l'exercice et à l'entraînement
Améliorer l'aptitude aérobie et V . O2 max par l'entraînement
Force
Système endocrinien et exercice
Boucle sensori-motrice
Anatomophysiologie des circuits sensori-moteurs
Traitement de l'information
Attention et mémoire
Anticipation et préparation à l'action
Programmation du mouvement
Contrôle du mouvement en cours d'exécution .
Cinématique
Cinétique
Dynamique
Énergétique
Conclusion Index
Auteurs : Paul Delamarche, Thierry Horrut, Franck Multon, Vincent Nougier
Paul Delamarche, joueur de handball pendant de nombreuses années puis entraîneur, est à deux reprises vice-champion de France avec les équipes de son club. Il débute comme professeur d’éducation physique et sportive puis devient conseiller technique régional de handball en Bretagne et apporte à sa région le titre de champion de France inter-ligues masculin. Il engage, par la suite, une carrière universitaire et accède au titre de professeur d’université en 1994. Fondateur et directeur du laboratoire « Mouvement, Sport et Santé (M2S) » pendant près de trente ans, il a mené ses recherches en physiologie de l’exercice et en biomécanique du mouvement, récompensées par le premier prix de recherche Albert-Creff. Directeur de l’UFR STAPS de Rennes pendant dix ans, responsable du master STAPS interrégional, puis président pendant deux mandats de la Conférence nationale des directeurs et doyens de STAPS, il est aujourd’hui président d’honneur de la C3D et professeur émérite de l’université de Rennes. Très engagé dans la promotion de l’activité physique à des fins de santé, il participe dans ce domaine aux formations des médecins et des cadres sportifs et travaille avec l’Agence régionale de santé, des structures hospitalières, diverses associations et au sein du « Campus Sport Bretagne » pour lequel il est actuellement référent « Recherche » et « Sport-santé ».
Thierry Horrut, est cadre kinésithérapeute, titulaire d’un master STAPS « Mouvement, Sport et Santé ». Il est enseignant en institut de formation en masso-kinésithérapie et chargé d’enseignement à l’UFR APS de l’université de Rennes 2. Il enseigne l’anatomie, les techniques d’entrainement et de rééducation en APS, la traumatologie sportive, la réadaptation cardio-respiratoire et l’ergonomie. Il est membre associé du laboratoire de recherche « Mouvement, Sport et Santé (M2S) » de l’université de Rennes 2.
Franck Multon, est professeur à l’université Rennes 2, en STAPS, où il y enseigne depuis 1998. Il a co-construit les contenus de cours de biomécanique en STAPS à Rennes, et a été responsable de l’équipe de biomécanique du laboratoire M2S « Mouvement, Sport et Santé ». Il est coresponsable du Master IEAP « Ingénierie et ergonomie de l’activité physique » en STAPS à l’université Rennes 2. Ses recherches s’intéressent au développement de nouvelles méthodes d’analyse du mouvement sur le terrain, à la simulation de mannequins numériques et à la réalité virtuelle pour l’entraînement à des tâches motrices. Il est responsable d’une équipe de recherche « MimeTIC », commune avec Inria, l’École normale supérieure de Rennes et l’université Rennes 1, s’intéressant à l’analyse et à la simulation du mouvement humain.
Vincent Nougier, est professeur en STAPS à l’université Grenoble-Alpes. Il a été directeur de l’UFR STAPS de Grenoble et directeur d’un laboratoire de recherche pendant de nombreuses années. Aujourd’hui, il est responsable de l’équipe de recherche « Santé, Plasticité, Motricité » au sein du laboratoire Techniques de l’ingénierie médicale et de la complexité (UMR CNRS 5525), responsable du Master STAPS de l’université Grenoble-Alpes, et président en exercice de la 74e section du Conseil national des universités (CNU). Auteur ou co-auteur d’une centaine de publications internationales, il s’intéresse plus particulièrement au contrôle sensori-moteur des interactions posture-mouvement, chez le sujet sain et pathologique aux différents âges de la vie. Ses travaux ont une visée fondamentale pour comprendre les mécanismes sensori-moteurs sous-jacents au mouvement humain, et appliqués dans une perspective de rééducation des fonctions motrices lésées. Ayant enseigné à tous les niveaux du cursus STAPS, mais également dans les formations médicales et paramédicales, ses enseignements principaux concernent les mécanismes de contrôle de la posture et de la motricité humaine.
Les livres d'anatomie pour réussir vos études
Etudiants kiné, vos livres pour réussir
Tous les ouvrages STAPS sur notre site elsevier-masson.fr S’ouvre dans une nouvelle fenêtre